



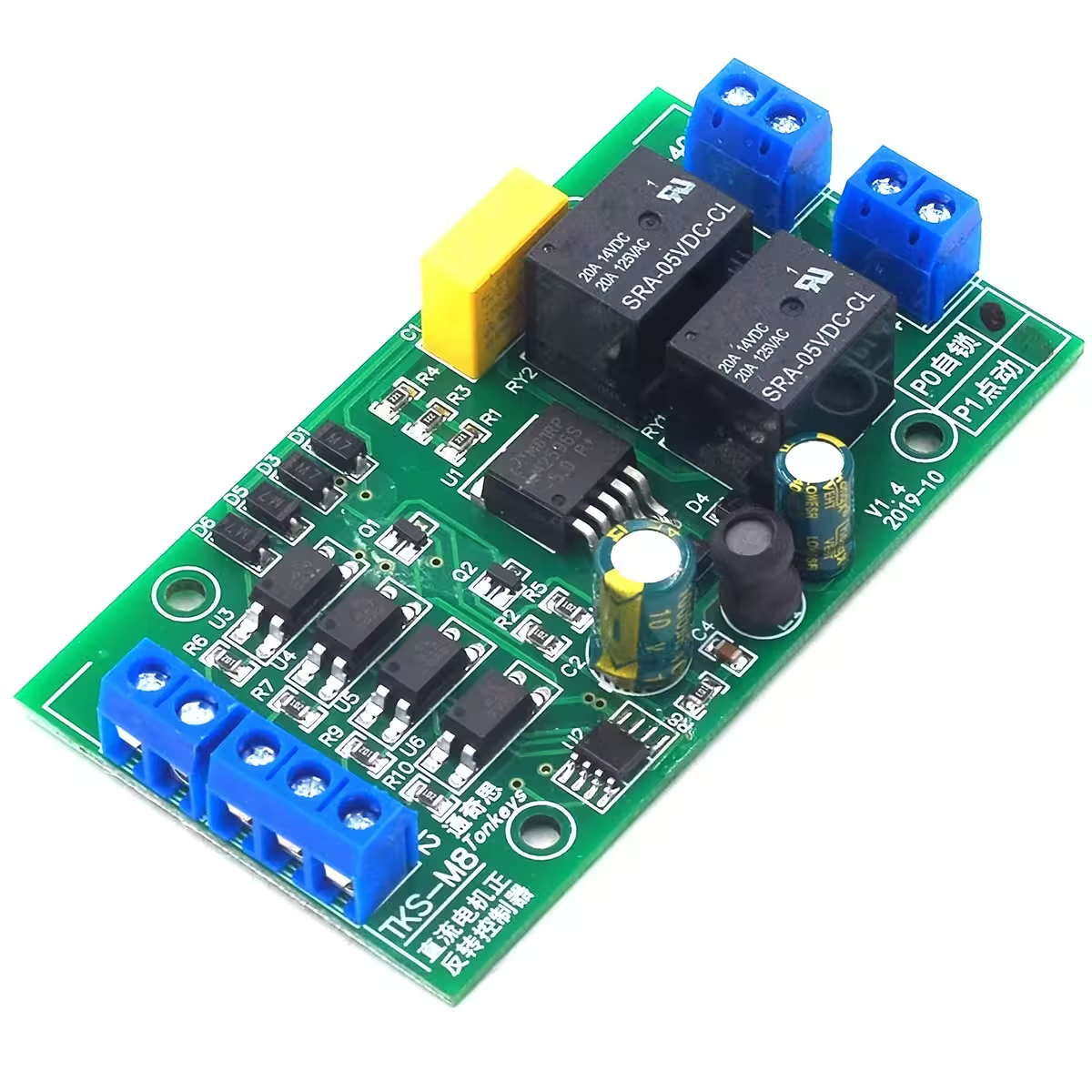
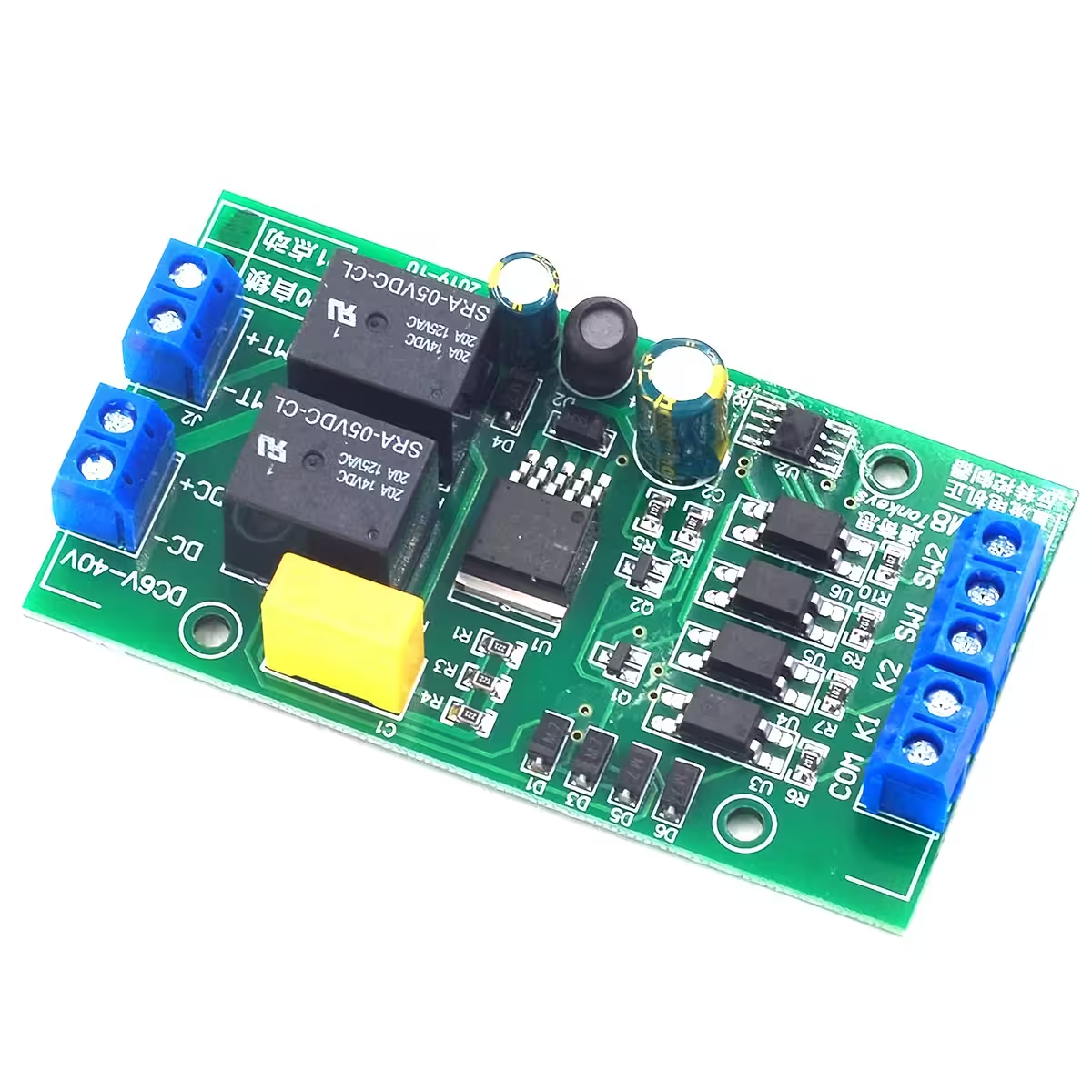
DC motor irányváltó vezérlő – előre/hátra mozgás vezérlése külső alkatrészek nélkül
Lineáris aktuátort, irányváltós mechanikát vagy egyedi DIY projektet építesz, ahol elengedhetetlen a precíz mozgásvezérlés? Dedikált modul nélkül hamar elveszhetsz a relék, tranzisztorok és bonyolult kábelezések útvesztőjében. Ez a DC motor irányváltó vezérlő mindezt egyetlen kompakt eszközben oldja meg: csak csatlakoztasd a tápegységet, a motort és a gombokat, és percek alatt üzemkész a rendszered.
Megjegyzés: A motor a tápegységgel megegyező feszültséget kapja. A kimeneti feszültség ezen a vezérlőn keresztül nem szabályozható.
Miért válaszd ezt a modellt? (Legfőbb előnyök):
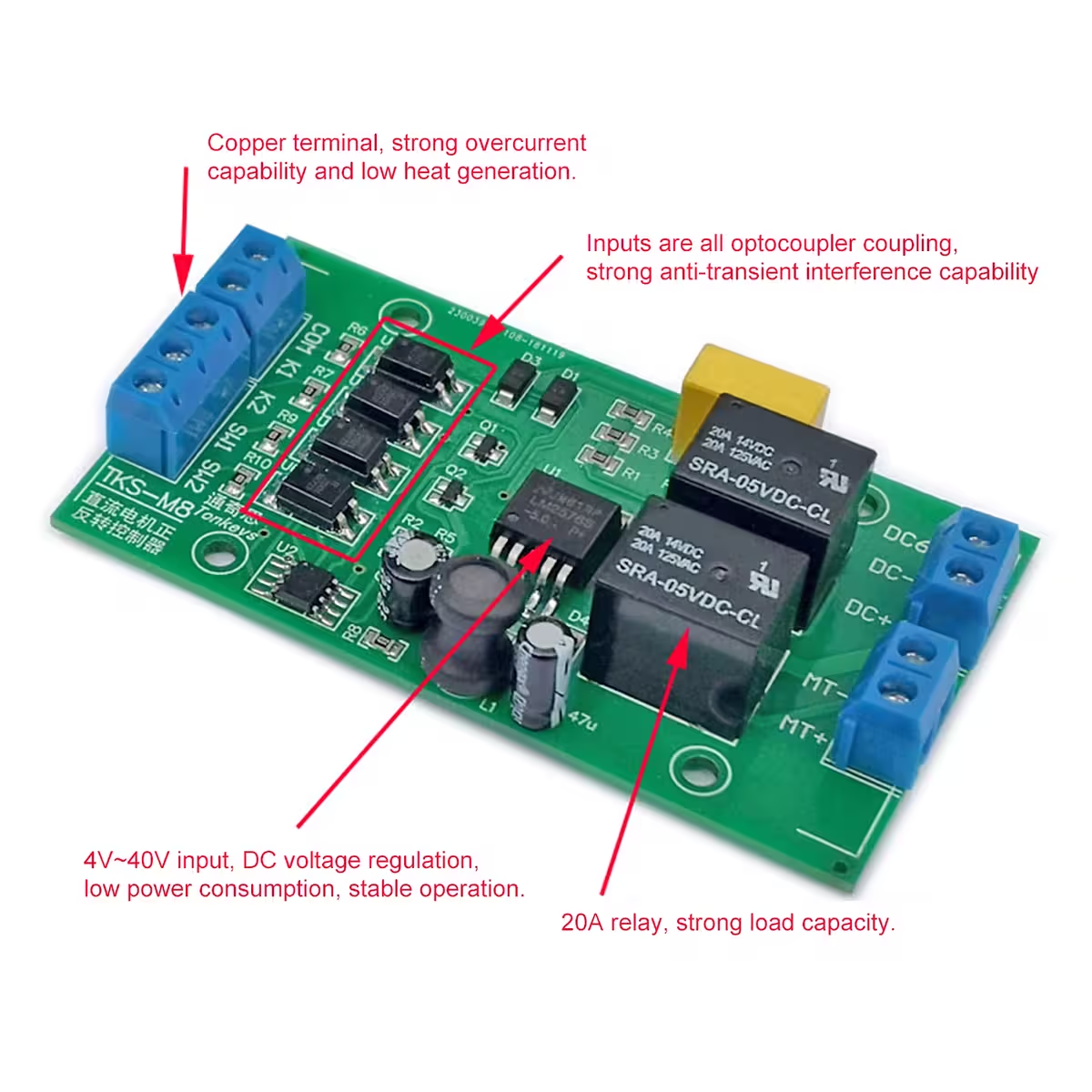
- Széles feszültségtartomány: 4–40V DC — módosítások nélkül használható LiPo akkumulátorokkal, labortápokkal vagy ipari tápegységekkel.
- Akár 20A kimeneti áramerősség — könnyedén kezeli a magas indítási áramfelvételű motorokat, kb. 80W terhelésig ideális.
- Két választható üzemmód: PO és P1 — az alkalmazástól függően választhatsz az öntartó (rövid impulzusra induló) és a jog (csak a gomb nyomva tartásáig aktív) módok között.
- Univerzális active-low bemenetek — közvetlenül csatlakoztathatsz egyszerű nyomógombokat, NO (alaphelyzetben nyitott) mechanikus végálláskapcsolókat vagy 3 vezetékes NPN szenzorokat, extra ellenállások vagy logikai áramkörök nélkül.
- Integrált SW1/SW2 végálláskapcsoló bemenetek — automatikus leállítás a végpontokon, így kizárható a mechanikus elakadás vagy a túlterhelés kockázata.
- >150.000 kapcsolási élettartam — valódi megbízhatóság a mindennapos, ismétlődő ciklusú alkalmazásokhoz.
- Alacsony saját fogyasztás: 0,6W aktív / 0,1W készenléti — nem meríti le az akkumulátort, amíg a rendszer várakozó üzemmódban van.
Részletek és teljesítmény
A vezérlő active-low (alacsony szinten aktív) bemeneti architektúrát használ: a bemenet akkor aktiválódik, ha a rajta lévő feszültség 2V alá esik. Ez azt jelenti, hogy az egyszerű nyomógombok, az NO (alaphelyzetben nyitott) mechanikus végálláskapcsolók és a 3 vezetékes NPN-NO szenzorok közvetlenül, köztes alkatrészek nélkül csatlakoztathatók.
A válaszidő a K1/K2 parancsok esetén ≈20ms, míg az SW1/SW2 végálláskapcsolóknál ≈50ms — elég gyors a dinamikus alkalmazásokhoz, ugyanakkor kellően stabil a téves kapcsolások elkerülése érdekében.
Nagyobb feszültség esetén az ajánlott áramerősség csökken: 12V-on akár 20A is használható, de 24V-nál javasolt ~10A-re korlátozni a hosszú távú, termikusan biztonságos működés érdekében. Mindig használj megfelelően méretezett biztosítékot és a terhelésnek megfelelő keresztmetszetű kábeleket.
| Paraméter | Érték / Részlet |
|---|---|
| Működési feszültség | DC 4–40V (ajánlott 6–36V) |
| Maximális kimeneti áram | akár 20A (12V-on) |
| Ajánlott motorteljesítmény | max. ~80W |
| Modul fogyasztása (aktív) | kb. 0,6W |
| Modul fogyasztása (készenlét) | kb. 0,1W |
| Bemeneti jel típusa | Active-low (aktív, ha a feszültség < 2V) |
| K1/K2 válaszidő | ≈ 20ms |
| SW1/SW2 válaszidő | ≈ 50ms |
| Üzemmódok | PO (öntartó) / P1 (jog / pillanatkapcsoló) |
| Élettartam | >150.000 kapcsolás |
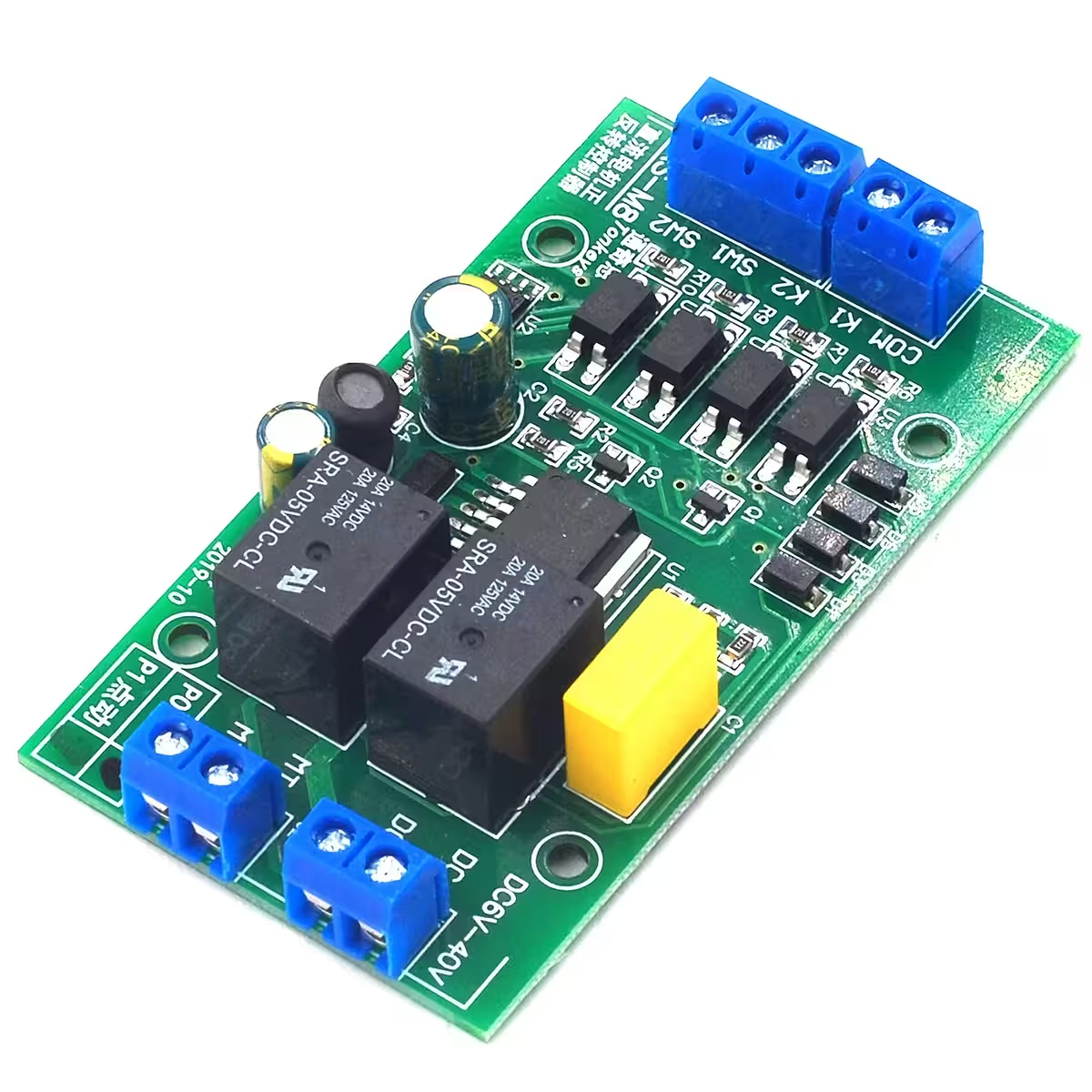
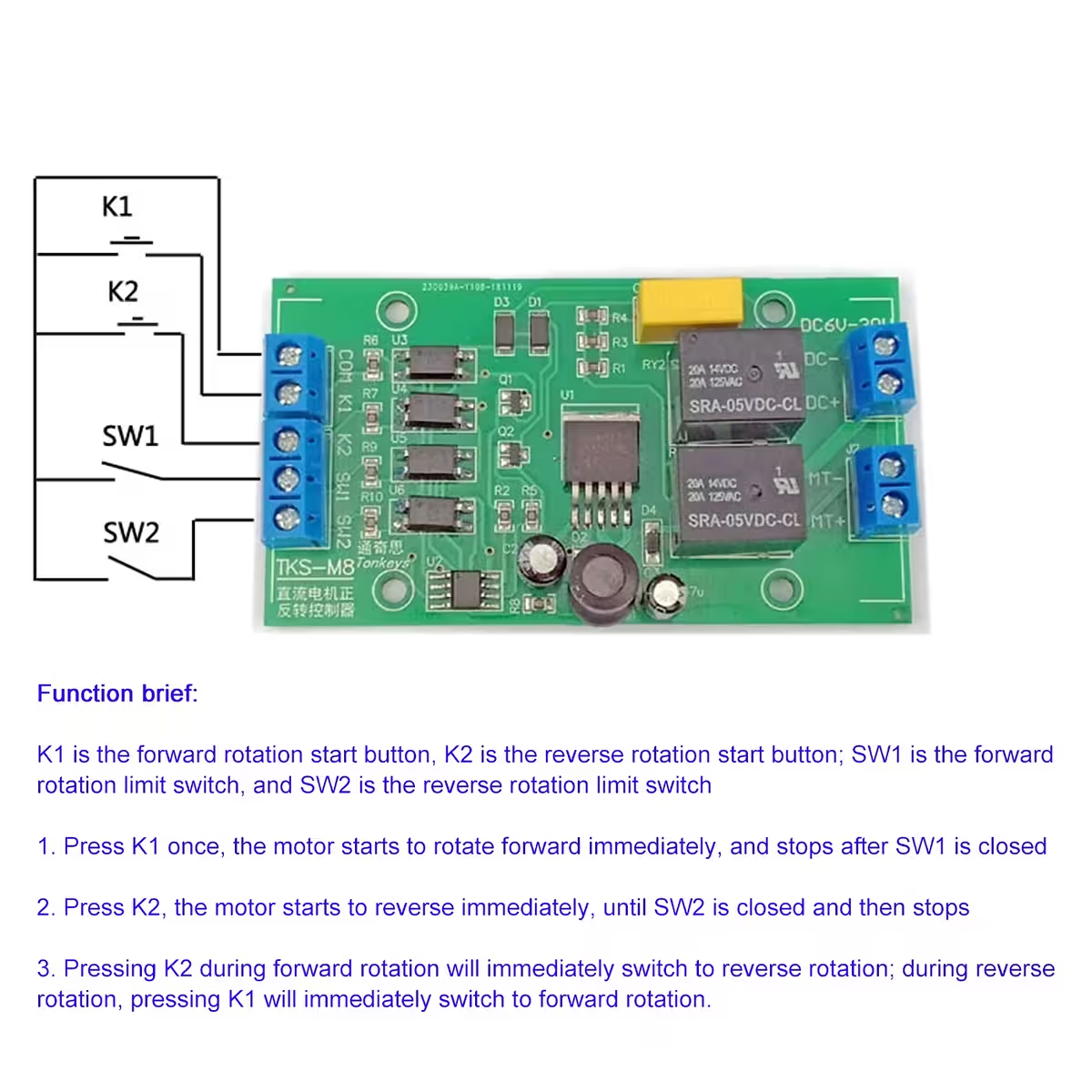
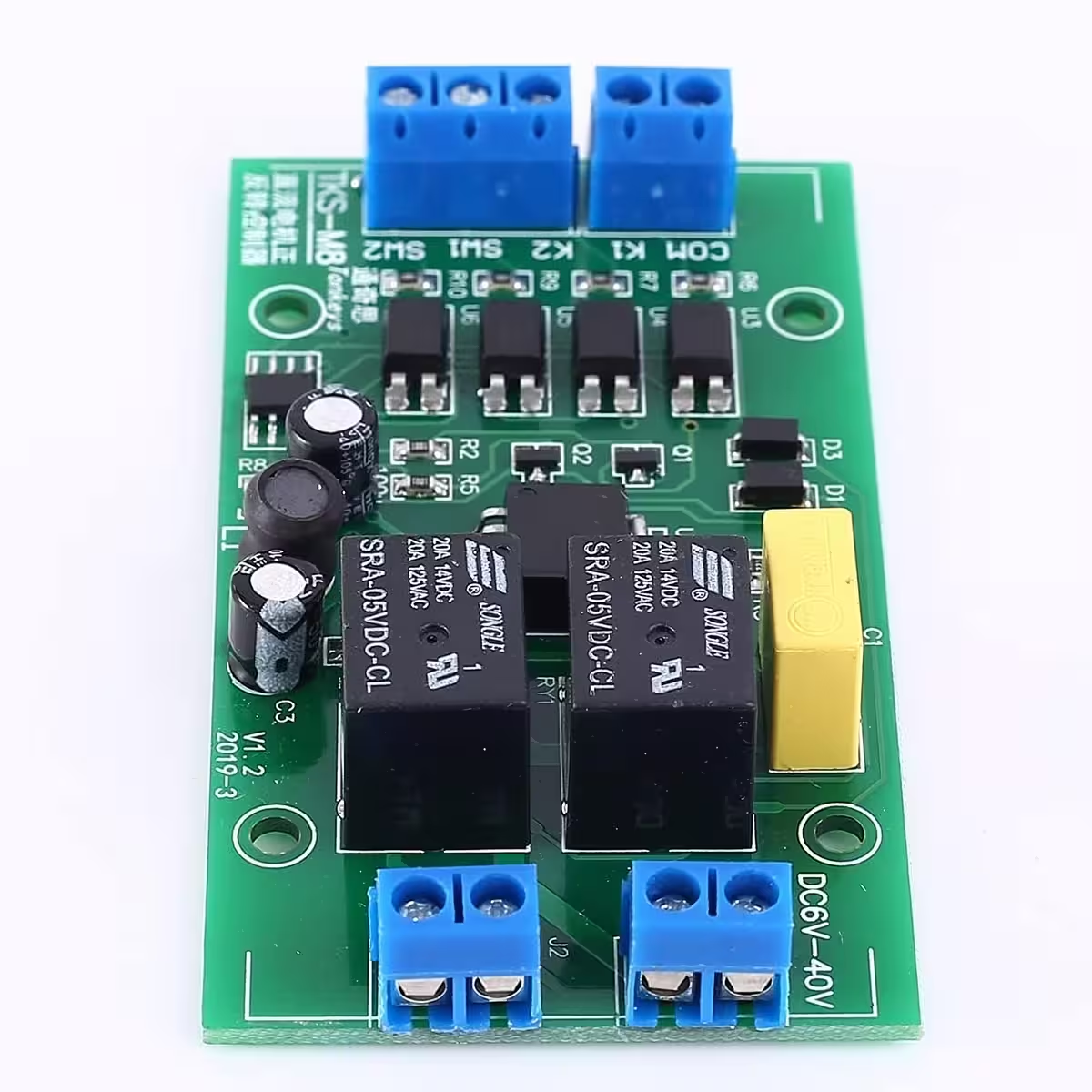
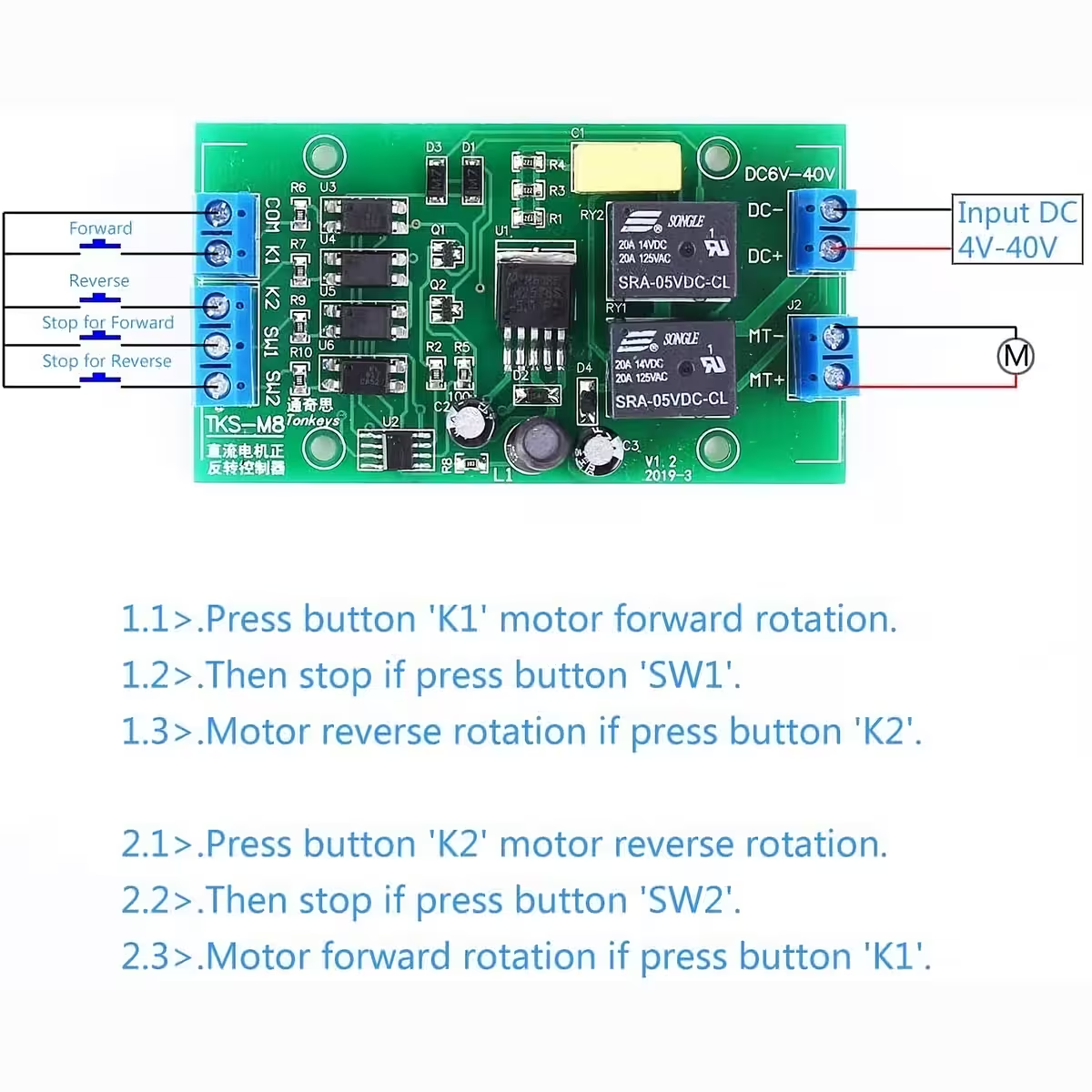
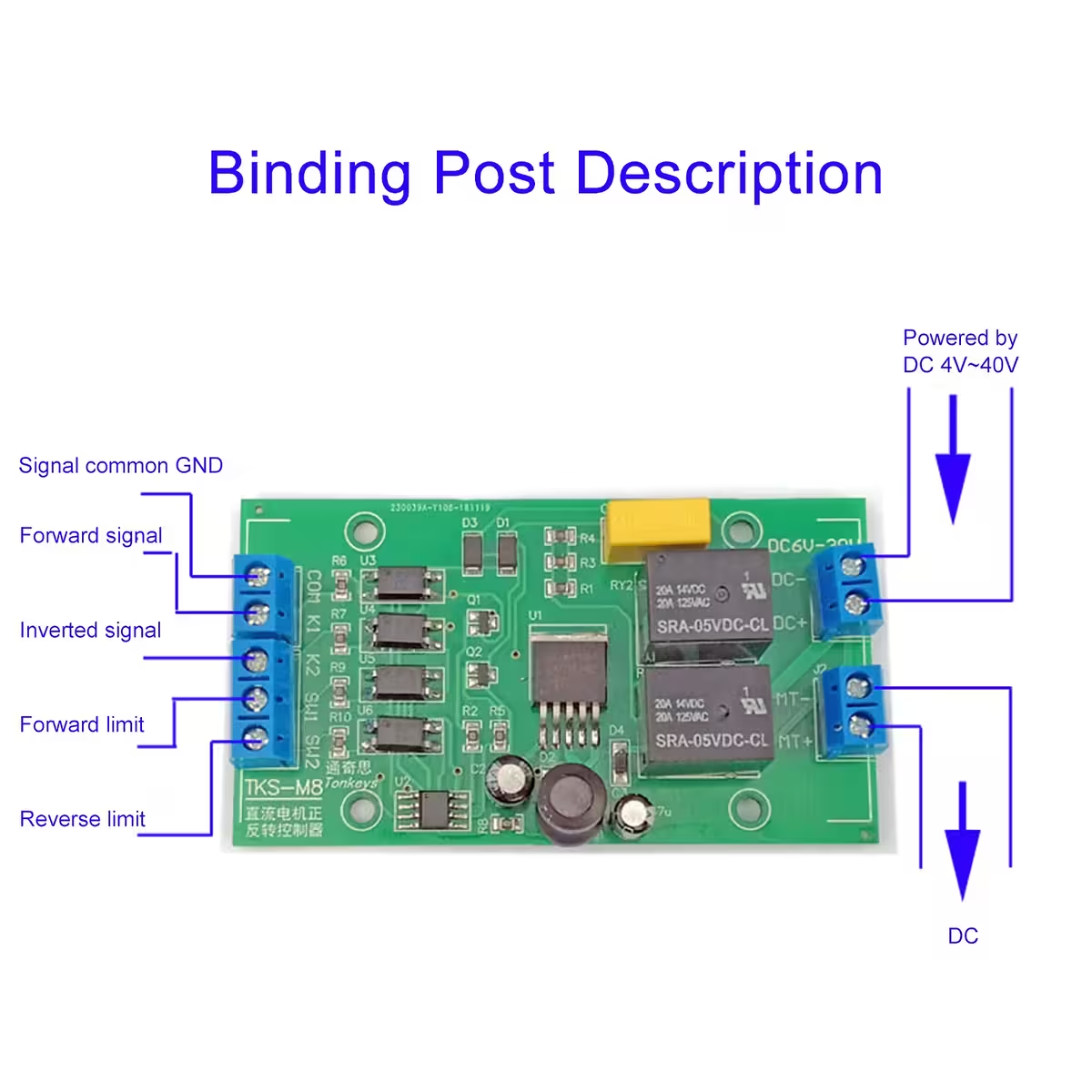
| K1 bemenet | Előre menet parancs (active-low) |
| K2 bemenet | Hátra menet parancs (active-low) |
| SW1 | Előre menet végálláskapcsoló (NO ajánlott) |
| SW2 | Hátra menet végálláskapcsoló (NO ajánlott) |
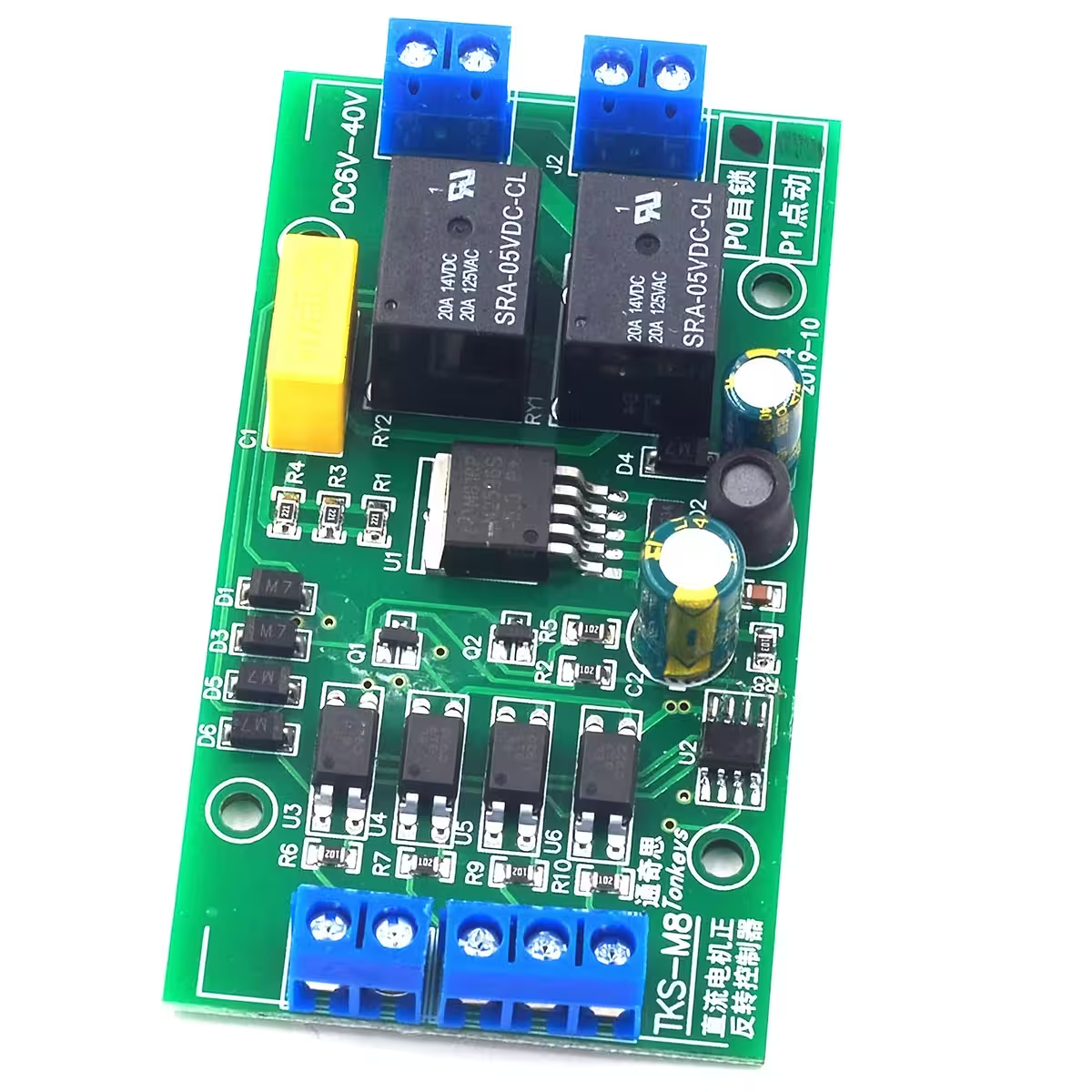
| VIN+ / VIN- | Modul tápellátása (DC 4–40V) |
| Motor+ / Motor- | Kimenet a DC motor felé |
Programozási és használati útmutató
PO mód (Öntartó): Egy rövid impulzus a K1 vagy K2 bemeneten elindítja a motort. Ezután a motor önállóan működik tovább, amíg a megfelelő végálláskapcsoló nem aktiválódik, vagy amíg ellentétes parancsot nem kap. Ideális automatizálási feladatokhoz.
P1 mód (Jog / Pillanatkapcsoló): A motor csak addig működik, amíg a K1 vagy K2 parancs aktív (a gomb nyomva van tartva). Tökéletes finombeállításokhoz és kézi pozicionáláshoz.
- Csatlakoztasd a tápegységet a VIN+ és VIN– pontokhoz (ügyelj a polaritásra).
- Csatlakoztasd a DC motort a Motor+ és Motor– kimenetekhez.
- Válaszd ki az üzemmódot: PO az öntartó, vagy P1 a jog (pillanatkapcsoló) működéshez.
- Csatlakoztasd a nyomógombokat vagy vezérlőjeleket a K1 (előre) és K2 (hátra) active-low bemenetekhez.
- Opcionálisan kösd be a mechanikus végálláskapcsolókat vagy NPN-NO szenzorokat az SW1 és SW2 csatlakozókra.
- Automatikus A→B→A ciklikus mozgáshoz: csatlakoztasd az „A” pozíciójú NO kapcsoló kimenetét a K1-hez, a „B” pozícióét pedig a K2-höz, az SW1/SW2 bemeneteket pedig hagyd szabadon.
- Arduino integrációhoz: kösd össze az Arduino GND-jét a vezérlő GND-jével, az előre mozgás digitális pinjét a K1-hez, a hátra mozgásét pedig a K2-höz. Állítsd a pineket OUTPUT-ra, és adj ki LOW jelet az aktiváláshoz.
- Ellenőrizd a motor indítási áramfelvételét, és gondoskodj egy megfelelően méretezett biztosítékról a tápvezetéken.
A csomag tartalma
- 1 × DC motor irányváltó vezérlő modul (Előre / Hátra), PO/P1 módokkal
Gyakori kérdések
Mit jelent az active-low és miért fontos?
A bemenet akkor aktiválódik, ha a feszültség 2V alá csökken — vagyis amikor a földhöz (GND) csatlakozik. Az egyszerű nyomógombok, az NO mechanikus végálláskapcsolók és az NPN szenzorok pontosan így működnek. Nincs szükség extra ellenállásokra vagy jelfordító logikára.
Mi a különbség a PO és a P1 mód között?
A PO (öntartó) módban egy rövid impulzus a K1 vagy K2 bemeneten elindítja a motort, ami önállóan megy tovább a végálláskapcsolóig vagy az ellentétes parancsig — ez automatizáláshoz hasznos. A P1 (jog) módban a motor csak addig forog, amíg a parancs aktív (a gombot nyomva tartod) — ez precíz beállításokhoz vagy kézi vezérléshez ideális.
Közvetlenül csatlakoztathatom a vezérlőt egy Arduino-hoz?
Igen. Csak kösd össze az Arduino GND-jét a vezérlő GND-jével, és használj két digitális pint OUTPUT-ra állítva. Amikor a pin LOW (alacsony) szinten van, a parancs aktív. Az Arduino kezeli a logikát, a vezérlő pedig a teljesítményt — mindenféle köztes alkatrész nélkül.
Használhatok alaphelyzetben zárt (NC) végálláskapcsolókat?
A vezérlő NO (alaphelyzetben nyitott) végálláskapcsolókhoz van optimalizálva. Az NC érintkezők megfordítják a logikát, ami nem kívánt működést eredményezhet. Az SW1 és SW2 bemenetekhez mindig NO érintkezőket használj.
Szükséges hűtőborda maximális áramerősség esetén?
A 20A-hez közeli áramerősségeknél vagy intenzív ciklusoknál gondoskodj a megfelelő szellőzésről, és figyeld a modul hőmérsékletét. Folyamatos, nagy terhelésű alkalmazások esetén egy kisebb hűtőborda vagy aktív hűtés (ventilátor) jelentősen meghosszabbíthatja az élettartamot.
Hogyan hozhatok létre automatikus ciklikus mozgást időzítő nélkül?
Csatlakoztasd az „A” pozíciójú NO kapcsolót a K1-hez, a „B” pozíciójút pedig a K2-höz, az SW1 és SW2 bemeneteket pedig hagyd szabadon. Amikor a mechanika eléri az egyik végpontot, a kapcsoló automatikusan aktiválja az ellentétes irányú parancsot — így a motor külső beavatkozás nélkül, folyamatosan oszcillál a két pont között.
Termékbemutató videó
Képgaléria











Értékelések
Még nincsenek értékelések.